INTELLIMAN Project
In the past decade, robotic manipulation systems, such as arms and grippers, have become more affordable and widely available. This has enabled their use beyond industrial settings, opening possibilities in healthcare, assistive technology, and daily life. However, their limited adaptability and inability to understand complex or changing environments remain major barriers to their reliable use in the real world.
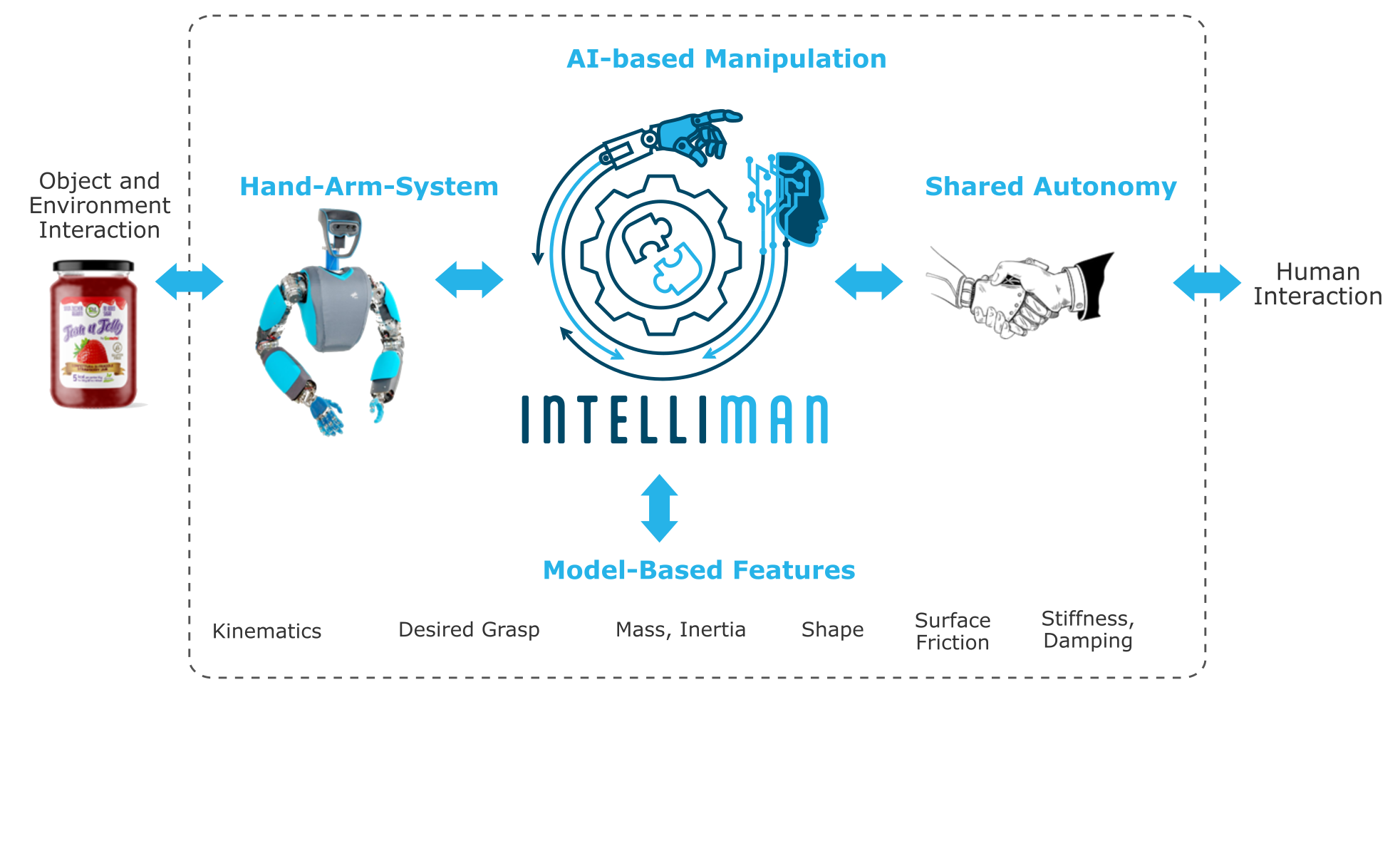
The IntelliMan project, funded by the EU’s Horizon 2020 programme, brings together 13 academic and industrial partners from six countries. The goal is to develop a new generation of intelligent robots capable of persistent learning. Robots that can adapt to new tasks, respond to unexpected situations, and interact meaningfully with people. These systems will use multiple sensors to perceive their surroundings, make autonomous decisions, detect errors during task execution, and recover, either by adjusting their actions or by seeking support through human interaction.
The IntelliMan technology will be tested in four real-world use cases: assistance with daily kitchen tasks, flexible manufacturing, the handling of soft or deformable objects such as fruits and vegetables, and upper-limb prosthetics. These scenarios reflect the diverse demands placed on robotic manipulation systems, from physical variability to social interaction.
At ETH Zurich, research focuses on understanding how people across all these scenarios perceive, adapt to, and accept intelligent robotic systems. This includes not only questions of control and system responsiveness but also how individual psychological factors, such as personality traits, emotional states, cognitive flexibility, and prior experience with technology, shape user interaction. These factors influence how easily users learn to work with a system, how much trust they place in it, and how naturally it becomes part of their everyday routines.
This human-centered approach is particularly relevant in the context of upper-limb prosthetics, where the robotic system becomes a direct extension of the user’s body. For such a device to be accepted and used fluently, users must experience a sense of agency, the feeling of initiating and controlling movement, and a sense of embodiment, where the prosthesis is perceived not as an external object, but as part of the body. For individuals with amputations, this integration can be further shaped by phantom limb sensations—vivid impressions of the missing limb that can support intuitive control, provided the system responds in a timely and coherent way.
By integrating findings from psychology, physiology, and human-computer interaction, IntelliMan contributes to the systematic development of robotic systems that are not only technically functional but also tailored to the cognitive and behavioural characteristics of their users.